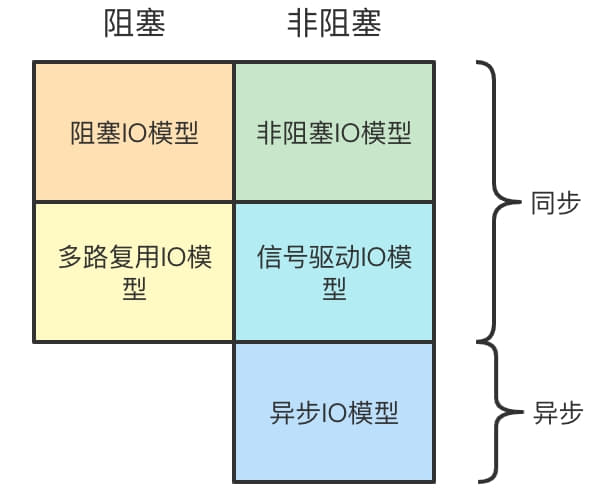
之前写过 Socket编程(三)——多进程、Socket编程(四)——IO复用和更多IO函数、Socket编程(五)——多线程这几篇与Socket编程有关的博客,然而当时是按照理解难度由浅到深编写的,总的来说还是不够系统。本篇博客就系统性地介绍一下Socket编程中的5种IO模型,并介绍如何使用这些模型实现高并发。它们分别为:
- 阻塞IO模型;
- 非阻塞IO模型;
- 多路复用IO模型;
- 信号驱动IO模型;
- 异步IO模型;
阻塞IO模型
阻塞IO,顾名思义,在读写操作时,当且进程会陷入阻塞,直到相关的资源就绪。以 read 为例,当缓冲区中没有数据时,进程会阻塞直至有新的数据到来。
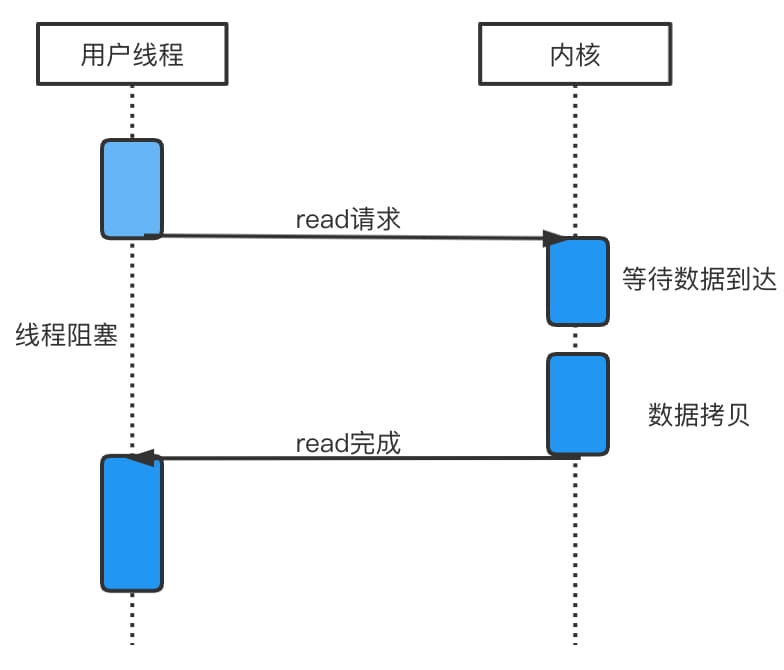
在单个进程(单个线程)中,阻塞式的IO模型是非常底效的,因为当前进程只能服务一个请求,在服务期间其他请求都会被搁置。想要在阻塞IO模型下实现高并发,可以使用多进程、多线程的方式来完成。然而,使用多进程和多线程模型都存在一定的缺陷:
- 多进程意味着需要为每一个服务对象提供一个进程,这会给服务器带来巨大的进程切换开销;
- 虽然多线程的系统开销比多进程小,但是线程的创建和销毁同样会带来系统开销。此时可能会考虑使用线程池来复用已有的连接,减少创建和关闭连接的频率。
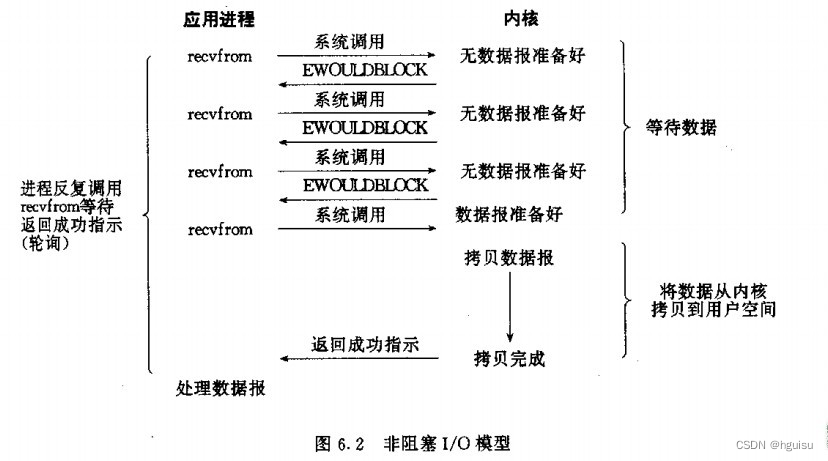
非阻塞IO
非阻塞IO和阻塞IO是对应的。还是以系统调用 read 为例,在进程中调用 read 后,当缓冲区中没有数据时,会立即返回一个 EWOULDBLOCK 或 EAGAIN 错误,表示缓冲区中没有数据。此时进程就不会阻塞,从而可以执行其他计算。通常来说,非阻塞IO会与 while 循环共同使用,重复检查资源是否就绪。
IO复用模型
严格来说,IO复用模型可以是阻塞的,也可以是非阻塞的。
IO复用算是解决高并发问题的一个非常有效的手段了。在Unix编程中,实现IO复用的系统调用主要是 select 和 epoll,前者可以理解为使用一个数组或集合来实现,后者可以理解为使用一个链表+红黑树实现,这里主要介绍更高效的 epoll。
前面说过IO复用模型可以是阻塞的,也可以是非阻塞的。“可以是阻塞的”主要是体现在对IO端口的监听上,但是这并不会影响 epoll 的效率,因为它可以同时对多个端口进行监听。
下面是一段 epoll 使用的示例代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
| #include <sys/epoll.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#define MAX_EVENTS 10
int main() {
int sock = socket(AF_INET, SOCK_STREAM, 0);
int epoll_fd = epoll_create1(0);
if (epoll_fd < 0) {
perror("epoll_create1");
exit(1);
}
struct epoll_event event;
event.events = EPOLLIN;
event.data.fd = sock;
epoll_ctl(epoll_fd, EPOLL_CTL_ADD, sock, &event);
struct epoll_event events[MAX_EVENTS];
while (1) {
int n_ready = epoll_wait(epoll_fd, events, MAX_EVENTS, -1);
if (n_ready < 0) {
perror("epoll_wait");
exit(1);
}
for (int i = 0; i < n_ready; i++) {
int fd = events[i].data.fd;
if (fd == sock) {
int client_fd = accept(sock, NULL, NULL);
fcntl(client_fd, F_SETFL, O_NONBLOCK);
event.events = EPOLLIN | EPOLLET;
event.data.fd = client_fd;
epoll_ctl(epoll_fd, EPOLL_CTL_ADD, client_fd, &event);
} else {
char buffer[1024];
while (1) {
ssize_t n = read(fd, buffer, sizeof(buffer));
if (n > 0) {
write(fd, buffer, n);
} else if (n == 0 || (n < 0 && errno != EAGAIN)) {
close(fd);
epoll_ctl(epoll_fd, EPOLL_CTL_DEL, fd, NULL);
break;
} else {
break;
}
}
}
}
}
return 0;
}
|
每次重新看 epoll 时都会非常地迷惑,搞不清楚这个系统调用到底在做什么,这里还是举一个之前博客中的例子,也是《TCP/IP》编程中的例子
把代码中的 events 看班级,我们的服务端socket是班主任,客户端socket是同学。但是同学想要被服务,需要先加入我们这个班级,所以班级里既有班主任也有学生。这就是为什么遍历处理所有就绪事件时,需要判断到底是服务端的sock还是客户端的sock的原因。
当班主任触发事件时,说明有新同学要进来,我们就把新同学加入到 events 中;
当班里同学触发事件时,说明班里的同学要提问题了,就由我们来解决问题并答复。
这样解释,epoll 存在的意义似乎就说得通了。
触发模式
需要注意,epoll 还支持设置触发模式,包含边缘触发和水平触发。具体可以看 IO复用 这篇博客。
信号驱动IO
信号IO理解起来也很简单,就是提前告诉操作系统,当某个事件触发时,向进程发送 SIGIO 信号。进程需要注册这个信号的处理函数,触发异步处理。信号驱动IO的一个很大缺点就是,只能得知有事件发生,但无法得知是哪个事件。所以对于TCP这种触发事件较多的协议,信号驱动IO很难派的上用场。相反,信号驱动IO更多用于UDP套接字。
下面的一段信号驱动IO的实例代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
| #include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <fcntl.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <errno.h>
#include <string.h>
int sock;
void sigio_handler(int signo) {
struct sockaddr_in client_addr;
socklen_t addr_len = sizeof(client_addr);
char buffer[1024];
ssize_t n = recvfrom(sock, buffer, sizeof(buffer), 0,
(struct sockaddr*)&client_addr, &addr_len);
if (n > 0) {
printf("Received %zd bytes from %s:%d\n", n,
inet_ntoa(client_addr.sin_addr), ntohs(client_addr.sin_port));
sendto(sock, buffer, n, 0, (struct sockaddr*)&client_addr, addr_len);
} else if (n < 0 && errno != EAGAIN) {
perror("recvfrom error");
}
}
int main() {
sock = socket(AF_INET, SOCK_DGRAM, 0);
if (sock < 0) {
perror("socket error");
exit(1);
}
struct sockaddr_in addr;
memset(&addr, 0, sizeof(addr));
addr.sin_family = AF_INET;
addr.sin_addr.s_addr = htonl(INADDR_ANY);
addr.sin_port = htons(8080);
if (bind(sock, (struct sockaddr*)&addr, sizeof(addr)) < 0) {
perror("bind error");
exit(1);
}
signal(SIGIO, sigio_handler);
int flags = fcntl(sock, F_GETFL, 0);
fcntl(sock, F_SETFL, flags | O_NONBLOCK | O_ASYNC);
fcntl(sock, F_SETOWN, getpid());
printf("Waiting for data...\n");
while (1) {
sleep(1);
}
close(sock);
return 0;
}
|
信号驱动式IO的并发性很差,并且编程复杂性高,但是实时性很强,比较适合低频率的实时控制。
异步IO
异步IO是一种并发性更高的IO模型,其原理主要是:应用程序发起IO操作后立即返回,内核在整个IO操作完成后通知应用,无须应用主动读写。遗憾的是Linux原生的异步IO机制io_uring较为复杂,学习曲线比较陡峭。现代开发者对异步IO的实现,更多依赖的事语言和框架的异步抽象(如Python、Go、Csharp等)。
总结
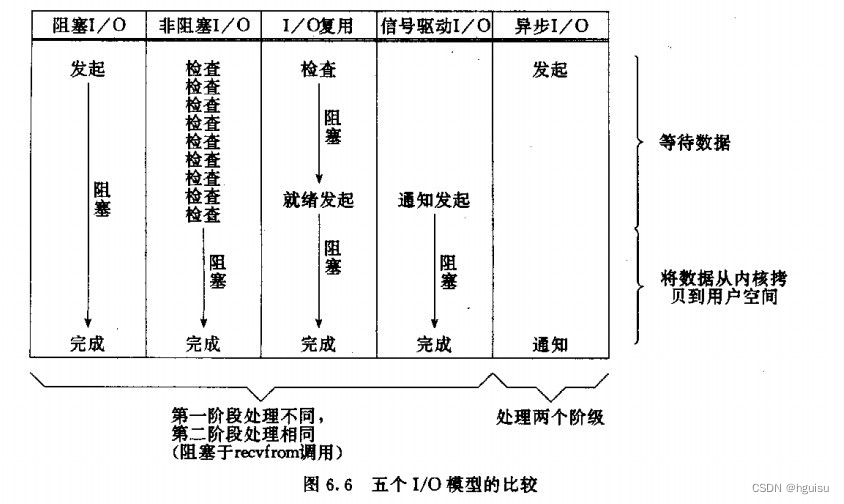
现代服务端对高并发的要求越来越高,为满足这样的需求,使用更多的还是IO复用模型。当然,具体使用哪个IO模型,还是需要结合具体的应用场景。
参考链接
网络编程 — Socket编程与IO模型
《TCP/IP编程》尹圣雨